
Informatique Industrielle Année 2004 - 2005
Note de cours
T.Dumartin
1 Généralités
1.1 Introduction
L'informatique, contraction d'information et automatique, est la science du traitement de l'information. Apparue au milieu du 20ème siècle, elle a connu une évolution extrêmement rapide. A sa motivation initiale qui était de faciliter et d'accélérer le calcul, se sont ajoutées de nombreuses
fonctionnalités, comme l'automatisation, le contrôle et la commande de processus, la communication ou le partage de l'information.
Le cours d’architecture des systèmes à microprocesseurs expose les principes de base du
traitement programmé de l’information. La mise en œuvre de ces systèmes s’appuie sur deux modes de réalisation distincts, le matériel et le logiciel. Le matériel (hardware) correspond à l’aspect concret du système : unité centrale, mémoire, organes d’entrées-sorties, etc… Le logiciel (software) correspond à un ensemble d’instructions , appelé programme, qui sont contenues dans les différentes mémoires du système et qui définissent les actions effectuées par le matériel.
1.2 Qu’entend-t-on par architecture ?
L'architecture d'un système à microprocesseur représente l’organisation de ses différentes
unités et de leurs interconnexions. Le choix d'une architecture est toujours le résultat d'un compromis :
- entre performances et coûts
- entre efficacité et facilité de construction
- entre performances d'ensemble et facilité de programmation
- etc …
 1.3 Qu’est ce qu’un microprocesseur ?
1.3 Qu’est ce qu’un microprocesseur ?
Un microprocesseur est un circuit intégré complexe. Il
résulte de l’intégration sur une puce de fonctions logiques combinatoires (logiques et/ou arithmétique) et séquentielles (registres, compteur, etc…). Il est capable d'interpréter et d'exécuter les instructions d'un programme. Son domaine d’utilisation est donc presque illimité. Le concept de microprocesseur a été créé par la Société Intel. Cette Société, créée en 1968, était spécialisée dans la conception et la fabrication de puces mémoire. À la demande de deux de ses clients — fabricants de calculatrices et de terminaux — Intel étudia une unité de calcul
implémentée sur une seule puce. Ceci donna naissance, en 1971, au premier microprocesseur, le
4004, qui était une unité de calcul 4 bits fonctionnant à 108 kHz. Il résultait de l’intégration d’environ 2300 transistors.
Remarques :
La réalisation de circuits intégrés de plus en plus complexe a été rendue possible par
l’apparition du transistor en 1947. Il a fallu attendre 1958 pour voir apparaître le 1 circuit intégré réalisé par Texas Instrument.
circuit intégré réalisé par Texas Instrument.
1.4 Rappels
Les informations traitées par un microprocesseur sont de différents types (nombres,
instructions, images, vidéo, etc…) mais elles sont toujours représentées sous un format binaire. Seul le codage changera suivant les différents types de données à traiter. Elles sont représentées
physiquement par 2 niveaux de tensions différents.
En binaire, une information élémentaire est appelé bit et ne peut prendre que deux valeurs différentes : 0 ou 1.
Une information plus complexe sera codée sur plusieurs bit. On appelle cet ensemble un mot.
Un mot de 8 bits est appelé un octet.
Représentation d’un nombre entier en binaire :
Les nombres sont exprimés par des chiffres pouvant prendre deux valeurs 0 ou 1. A chaque
chiffre est affecté un poids exprimé en puissance de 2.

Représentation d’un nombre entier en hexadécimal :
Lorsqu’une donnée est représentée sur plus de 4 bits, on préfère souvent l’exprimer en
hexadécimal. Les nombres sont exprimés par des chiffres et des lettres pouvant prendre 16 valeurs:
0 1 2 3 4 5 6 7 8 9 A B C D E F
A chaque chiffre est affecté un poids exprimé en puissance de 16.

Attention !! :

1.5 Où trouve-t-on des systèmes à microprocesseur ?
Les applications des systèmes à microprocesseurs sont multiples et variées :
- Ordinateur, PDA
- console de jeux
- calculatrice
- télévision
- téléphone portable
- distributeur automatique d’argent
- robotique
- lecteur carte à puce, code barre
- automobile
- instrumentation
- etc…
2 Architecture de base
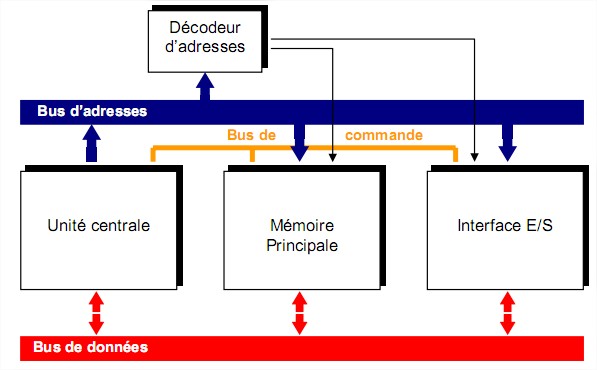
2.1 Modèle de von Neumann
Pour traiter une information, un microprocesseur seul ne suffit pas, il faut l’insérer au sein d’un
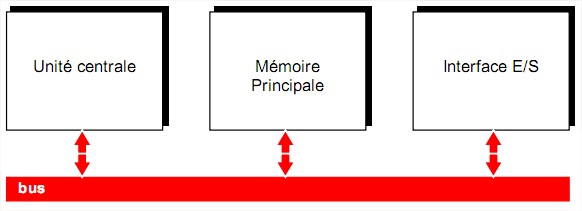
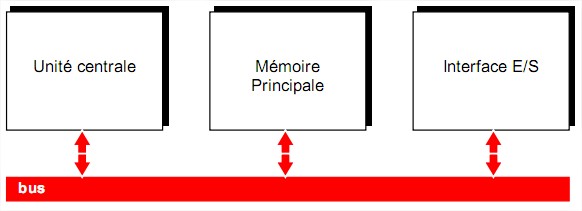
système minimum de traitement programmé de l’information. John Von Neumann est à l'origine d'un modèle de machine universelle de traitement programmé de l’information (1946). Cette architecture sert de base à la plupart des systèmes à microprocesseur actuel. Elle est composé des éléments suivants :
 une unité centrale
une unité centrale
une mémoire principale
des interfaces d’entrées/sorties
Les différents organes du système sont reliés par des voies de communication appelées bus.
2.2 L’unité centrale
Elle est composée par le microprocesseur qui est chargé d’interpréter et d’exécuter les
instructions d’un programme, de lire ou de sauvegarder les résultats dans la mémoire et de
communiquer avec les unités d’échange. Toutes les activités du microprocesseur sont cadencées par une horloge.
On caractérise le microprocesseur par :
– sa fréquence d’horloge : en MHz ou GHz
– le nombre d’instructions par secondes qu’il est capable d’exécuter : en MIPS
– la taille des données qu’il est capable de traiter : en bits
2.3 La mémoire principale
Elle contient les instructions du ou des programmes en cours d’exécution et les données
associées à ce programme. Physiquement, elle se décompose souvent en :
– une mémoire morte ( ROM = Read Only Memory ) chargée de stocker le programme. C’est une mémoire à lecture seule.
– une mémoire vive ( RAM = Random Access Memory ) chargée de stocker les données intermédiaires ou les résultats de calculs. On peut lire ou écrire des données dedans, ces données sont perdues à la mise hors tension.
Remarque :
Les disques durs, disquettes, CDROM, etc… sont des périphériques de stockage et sont considérés comme des mémoires secondaires.
2.4 Les interfaces d’entrées/sorties
Elles permettent d’assurer la communication entre le microprocesseur et les périphériques. (capteur, clavier, moniteur ou afficheur, imprimante, modem, etc…).
2.5 Les bus
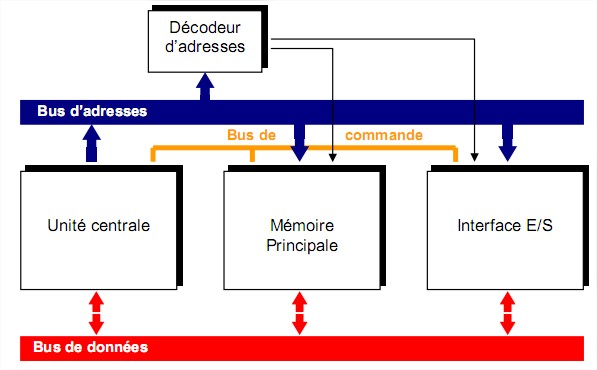
Un bus est un ensemble de fils qui assure la transmission du même type d’information. On
retrouve trois types de bus véhiculant des informations en parallèle dans un système de traitement
programmé de l’information :
- un bus de données : bidirectionnel qui assure le transfert des informations entre le microprocesseur et son environnement, et inversement. Son nombre de lignes est égal à la capacité de traitement du microprocesseur.
- un bus d'adresses: unidirectionnel qui permet la sélection des informations à traiter dans un espace mémoire (ou espace adressable) qui peut avoir 2n
emplacements, avec n = nombre de conducteurs du bus d'adresses.
- un bus de commande: constitué par quelques conducteurs qui assurent la synchronisation des flux d'informations sur les bus des données et des adresses.
2.6 Décodage d’adresses
La multiplication des périphériques autour du microprocesseur oblige la présence d’un
décodeur d’adresse chargé d’aiguiller les données présentes sur le bus de données.
En effet, le microprocesseur peut communiquer avec les différentes mémoires et les différents
boîtier d’interface. Ceux-ci sont tous reliés sur le même bus de données et afin d’éviter des conflits, un seul composant doit être sélectionné à la fois.
Lorsqu’on réalise un système microprogrammé, on attribue donc à chaque périphérique une zone
d’adresse et une fonction « décodage d’adresse » est donc nécessaire afin de fournir les signaux de
sélection de chacun des composants.
Remarque : lorsqu’un composant n’est pas sélectionné, ses sorties sont mises à l’état « haute
impédance » afin de ne pas perturber les données circulant sur le bus. ( elle présente une impédance de sortie très élevée = circuit ouvert ).
3 Les mémoires
Une mémoire est un circuit à semi-conducteur permettant d’enregistrer, de conserver et de restituer des informations (instructions et variables). C’est cette capacité de mémorisation qui explique la polyvalence des systèmes numériques et leur adaptabilité à de nombreuses situations. Les informations peuvent être écrites ou lues. Il y a écriture lorsqu'on enregistre des informations en mémoire, lecture lorsqu'on récupère des informations précédemment enregistrées.
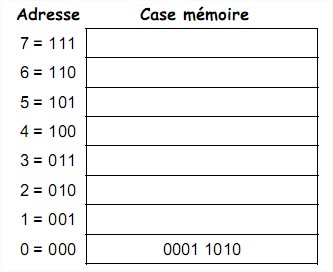
3.1 Organisation d’une mémoire
Une mémoire peut être représentée comme une armoire de rangement constituée de différents
tiroirs. Chaque tiroir représente alors une case mémoire qui peut contenir un seul élément : des
données. Le nombre de cases mémoires pouvant être très élevé, il est alors nécessaire de pouvoir
les identifier par un numéro. Ce numéro est appelé adresse. Chaque donnée devient alors
accessible grâce à son adresse
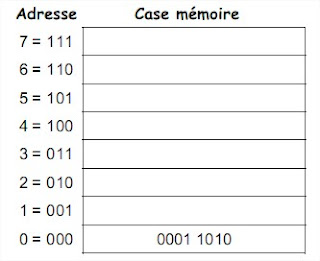
Avec une adresse de n bits il est possible de référencer au plus  cases mémoire. Chaque case est remplie par un mot de données (sa longueur m est toujours une puissance de 2). Le nombre de fils d’adresses d’un boîtier mémoire définit donc le nombre de cases mémoire que comprend le boîtier. Le nombre de fils de données définit la taille des données que l’on peut sauvegarder dans chaque case mémoire.
cases mémoire. Chaque case est remplie par un mot de données (sa longueur m est toujours une puissance de 2). Le nombre de fils d’adresses d’un boîtier mémoire définit donc le nombre de cases mémoire que comprend le boîtier. Le nombre de fils de données définit la taille des données que l’on peut sauvegarder dans chaque case mémoire.
En plus du bus d’adresses et du bus de données, un boîtier mémoire comprend une entrée de
commande qui permet de définir le type d’action que l’on effectue avec la mémoire (lecture/écriture) et une entrée de sélection qui permet de mettre les entrées/sorties du boîtier en haute impédance.
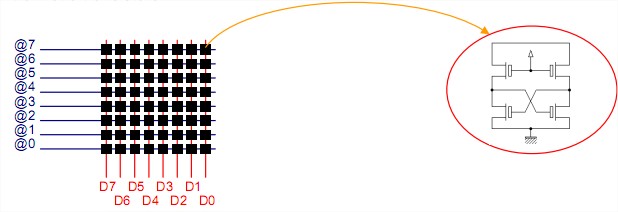
On peut donc schématiser un circuit mémoire par la figure suivante où l’on peut distinguer :

 les entrées d’adresses
les entrées d’adresses
les entrées de données
les sorties de données
les entrées de commandes :
- une entrée de sélection de lecture ou d’écriture.
- une entrée de sélection du circuit.
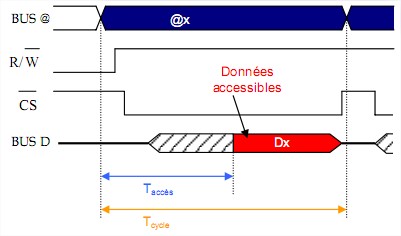
Une opération de lecture ou d’écriture de la mémoire suit toujours le même cycle :
1. sélection de l’adresse
2. choix de l’opération à effectuer
3. sélection de la mémoire
4. lecture ou écriture la donnée
Remarque :
Les entrées et sorties de données sont très souvent regroupées sur des bornes bidirectionnelles.
3.2 Caractéristiques d’une mémoire
 La capacité : c’est le nombre total de bits que contient la mémoire. Elle s’exprime aussi
La capacité : c’est le nombre total de bits que contient la mémoire. Elle s’exprime aussi
souvent en octet.
Le format des données : c’est le nombre de bits que l’on peut mémoriser par case mémoire.
On dit aussi que c’est la largeur du mot mémorisable.
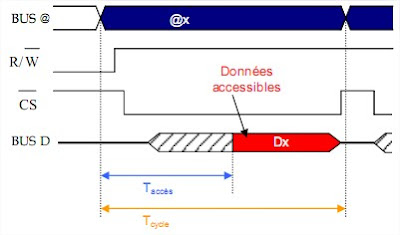
Le temps d’accès : c’est le temps qui s'écoule entre l'instant où a été lancée une opération
de lecture/écriture en mémoire et l'instant où la première information est disponible sur le bus
de données.
Le temps de cycle : il représente l'intervalle minimum qui doit séparer deux demandes
successives de lecture ou d'écriture.
Le débit : c’est le nombre maximum d'informations lues ou écrites par seconde.
Volatilité : elle caractérise la permanence des informations dans la mémoire. L'information
stockée est volatile si elle risque d'être altérée par un défaut d'alimentation électrique et non
volatile dans le cas contraire.
Exemple : Chronogramme d’un cycle de lecture
Remarque :
Les mémoires utilisées pour réaliser la mémoire principale d’un système à microprocesseur
sont des mémoires à semi-conducteur. On a vu que dans ce type de mémoire, on accède directement à n'importe quelle information dont on connaît l'adresse et que le temps mis pour obtenir cette information ne dépend pas de l'adresse. On dira que l'accès à une telle mémoire est aléatoire ou direct.
A l'inverse, pour accéder à une information sur bande magnétique, il faut dérouler la bande en
repérant tous les enregistrements jusqu'à ce que l'on trouve celui que l'on désire. On dit alors que
l'accès à l'information est séquentiel. Le temps d'accès est variable selon la position de l'information recherchée. L'accès peut encore être semi-séquentiel : combinaison des accès direct et séquentiel. Pour un disque magnétique par exemple l'accès à la piste est direct, puis l'accès au secteur est séquentiel.
3.3 Différents types de mémoire
3.3.1 Les mémoires vives (RAM)
Une mémoire vive sert au stockage temporaire de données. Elle doit avoir un temps de cycle
très court pour ne pas ralentir le microprocesseur. Les mémoires vives sont en général volatiles : elles perdent leurs informations en cas de coupure d'alimentation. Certaines d'entre elles, ayant une faible consommation, peuvent être rendues non volatiles par l'adjonction d'une batterie. Il existe deux grandes familles de mémoires RAM (Random Acces Memory : mémoire à accès aléatoire) :
 Les RAM statiques
Les RAM statiques
Les RAM dynamiques
3.3.1.1 Les RAM statiques
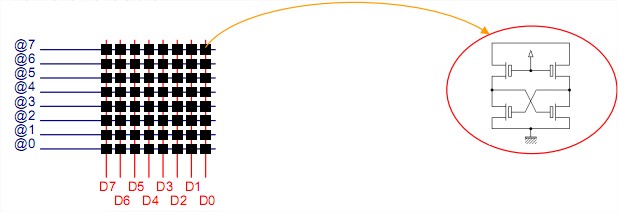
Le bit mémoire d'une RAM statique (SRAM) est composé d'une bascule. Chaque bascule
contient entre 4 et 6 transistors.
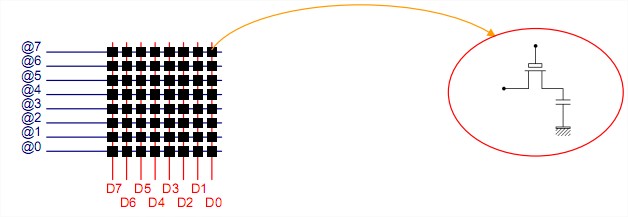
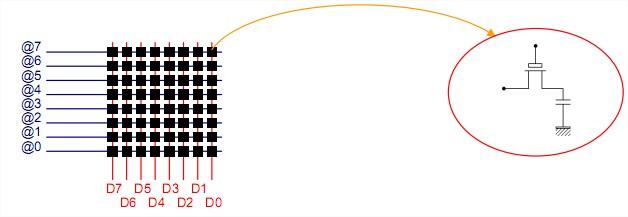
3.3.1.2 Les RAM dynamiques
Dans les RAM dynamiques (DRAM), l'information est mémorisée sous la forme d'une charge
électrique stockée dans un condensateur (capacité grille substrat d'un transistor MOS).
Avantages :
Cette technique permet une plus grande densité d'intégration, car un point mémoire nécessite
environ quatre fois moins de transistors que dans une mémoire statique. Sa consommation s’en
retrouve donc aussi très réduite.
Inconvénients :
La présence de courants de fuite dans le condensateur contribue à sa décharge. Ainsi,
l’information est perdue si on ne la régénère pas périodiquement (charge du condensateur). Les RAM dynamiques doivent donc être rafraîchies régulièrement pour entretenir la mémorisation : il s'agit de lire l'information et de la recharger. Ce rafraîchissement indispensable a plusieurs conséquences :
- il complique la gestion des mémoires dynamiques car il faut tenir compte des actions de rafraîchissement qui sont prioritaires.
- la durée de ces actions augmente le temps d'accès aux informations.
D’autre part, la lecture de l’information est destructive. En effet, elle se fait par décharge de la capacité du point mémoire lorsque celle-ci est chargée. Donc toute lecture doit être suivie d’une
réécriture.
3.3.1.3 Conclusions
En général les mémoires dynamiques, qui offrent une plus grande densité d'information et un
coût par bit plus faible, sont utilisées pour la mémoire centrale, alors que les mémoires statiques, plus rapides, sont utilisées lorsque le facteur vitesse est critique, notamment pour des mémoires de petite taille comme les caches et les registres.
Remarques :
Voici un historique de quelques DRAM qui ont ou sont utilisées dans les PC :
 La DRAM FPM (Fast Page Mode, 1987) : Elle permet d'accéder plus rapidement à des données en introduisant la notion de page mémoire. (33 à 50 Mhz)
La DRAM FPM (Fast Page Mode, 1987) : Elle permet d'accéder plus rapidement à des données en introduisant la notion de page mémoire. (33 à 50 Mhz)
La DRAM EDO (Extended Data Out, 1995) : Les
composants de cette mémoire permettent de conserver
plus longtemps l'information, on peut donc ainsi espacer les cycles de rafraîchissement. Elle apporte aussi la possibilité d’anticiper sur le prochain cycle mémoire. (33 à 50 Mhz)
La DRAM BEDO (Bursted EDO) : On n'adresse plus chaque unité de mémoire individuellement lorsqu'il faut y lire ou y écrire des données. On se contente de transmettre l'adresse de départ du processus de lecture/écriture et la longueur du bloc de données ( Burst ). Ce procédé permet de gagner beaucoup de temps, notamment avec les grands paquets de données tels qu'on en manipule avec les applications modernes. (66 Mhz)
 La Synchronous DRAM (SDRAM, 1997) : La mémoire SDRAM a pour particularité de se synchroniser sur une horloge. Les mémoires FPM, EDO étaient des mémoires asynchrones et elle
La Synchronous DRAM (SDRAM, 1997) : La mémoire SDRAM a pour particularité de se synchroniser sur une horloge. Les mémoires FPM, EDO étaient des mémoires asynchrones et elle
induisaient des temps d'attentes lors de la synchronisation. Elle se compose en interne de deux bancs de mémoire et des données peuvent être lues alternativement sur l'un puis sur l'autre de ces bancs grâce à un procédé d'entrelacement spécial. Le protocole d'attente devient donc tout à fait inutile. Cela lui permet de supporter des fréquences plus élevées qu’avant (100 Mhz).
 La DDR-I ou DDR-SDRAM (Double Data Rate
La DDR-I ou DDR-SDRAM (Double Data Rate
Synchronous DRAM, 2000) : La DDR-SDRAM
permet de recevoir ou d'envoyer des données lors
du front montant et du front descendant de l’horloge.
(133 à 200 MHz)
3.3.2 Les mémoires mortes (ROM)
Pour certaines applications, il est nécessaire de pouvoir conserver des informations de façon
permanente même lorsque l'alimentation électrique est interrompue. On utilise alors des mémoires
mortes ou mémoires à lecture seule (ROM : Read Only Memory). Ces mémoires sont non volatiles.
Ces mémoires, contrairement aux RAM, ne peuvent être que lue. L’inscription en mémoire des
données restent possible mais est appelée programmation. Suivant le type de ROM, la méthode de
programmation changera. Il existe donc plusieurs types de ROM :
ROM PROM EPROM EEPROM FLASH EPROM.
3.3.2.1 LA ROM
Elle est programmée par le fabricant et son contenu ne peut plus être ni modifié., ni effacé par
l'utilisateur.
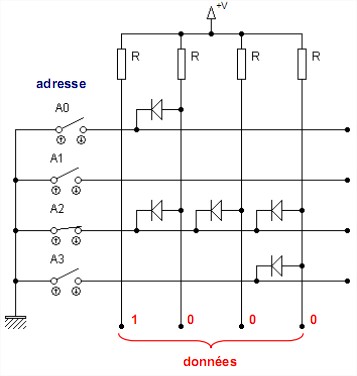
 Structure :
Structure :
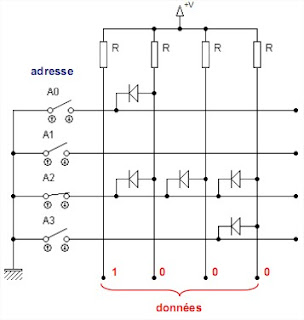
Cette mémoire est composée d'une matrice dont la programmation s’effectue en reliant les lignes aux colonnes par des diodes. L'adresse permet de sélectionner une ligne de la matrice et les données sont alors reçues sur les colonnes (le nombre de colonnes fixant la taille des mots mémoire).
Programmation :
L'utilisateur doit fournir au constructeur un masque indiquant les emplacements des diode dans matrice.
Avantages :
 Densité élevée
Densité élevée
Non volatile
Mémoire rapide
Inconvénients :
 Écriture impossible
Écriture impossible
Modification impossible (toute erreur est fatale).
Délai de fabrication (3 à 6 semaines)
Obligation de grandes quantités en raison du coût élevé qu'entraîne la production du masque et le processus de fabrication.
3.3.2.2 La PROM
C’est une ROM qui peut être programmée une seule fois par l'utilisateur (Programmable ROM). La programmation est réalisée à partir d’un programmateur spécifique.
Structure :
Les liaisons à diodes de la ROM sont remplacées par des fusibles pouvant être détruits ou des
jonctions pouvant être court-circuitées.
Programmation :
Les PROM à fusible sont livrées avec toutes les lignes connectées aux colonnes (0 en chaque
point mémoire). Le processus de programmation consiste donc à programmer les emplacements des ‘’1’’ en générant des impulsions de courants par l’intermédiaire du programmateur ; les fusibles situés aux points mémoires sélectionnés se retrouvant donc détruits.
Le principe est identique dans les PROM à jonctions sauf que les lignes et les colonnes sont
déconnectées (1 en chaque point mémoire). Le processus de programmation consiste donc à
programmer les emplacements des ‘’0’’ en générant des impulsions de courants par l’intermédiaire du programmateur ; les jonctions situées aux points mémoires sélectionnés se retrouvant court-circuitées par effet d’avalanche.
Avantages :
 idem ROM
idem ROM
Claquage en quelques minutes
Coût relativement faible
Inconvénients :
Modification impossible (toute erreur est fatale).
3.3.2.3 L’EPROM ou UV-EPROM
Pour faciliter la mise au point d'un programme ou tout simplement permettre une erreur de
programmation, il est intéressant de pouvoir reprogrammer une PROM. La technique de claquage
utilisée dans celles-ci ne le permet évidemment pas. L'EPROM (Erasable Programmable ROM) est une PROM qui peut être effacée.
Structure

Dans une EPROM, le point mémoire est réalisé à partir d’un
transistor FAMOS (Floating gate Avalanche injection Metal Oxyde Silicium). Ce transistor MOS a été introduit par Intel en 1971 et a la particularité de posséder une grille flottante.
 Programmation
Programmation
 La programmation consiste à piéger des charges dans la grille
La programmation consiste à piéger des charges dans la grille
flottante. Pour cela, il faut tout d’abord appliquer une très forte tension entre Grille et Source. Si l’on applique ensuite une tension entre D et S, la canal devient conducteur. Mais comme la tension Grille-Source est très importante, les électrons sont déviés du canal vers la grille flottante et capturés par celle-ci. Cette charge se maintient une dizaine d'années en condition normale. L’exposition d’une vingtaine de minutes à un rayonnement ultraviolet permet d’annuler la charge stockée dans la grille flottante. Cet effacement est reproductible plus d’un millier de fois. Les boîtiers des EPROM se caractérise donc par la présence d’une petite fenêtre transparente en quartz qui assure le passage des UV. Afin d’éviter toute perte accidentelle de l’information, il faut obturer la fenêtre d’effacement lors de l’utilisation.
 Avantages :
Avantages :
 Reprogrammable et non Volatile
Reprogrammable et non Volatile
Inconvénients :
Impossible de sélectionner une seule cellule à effacer
Impossible d’effacer la mémoire in-situ.
l’écriture est beaucoup plus lente que sur une RAM. (environ 1000x)
3.3.2.4 L’EEPROM
L’EEPROM (Electically EPROM) est une mémoire programmable et effaçable électriquement.
Elle répond ainsi à l’inconvénient principal de l’EPROM et peut être programmée in situ.
Structure
Dans une EEPROM, le point mémoire est réalisé à partir d’un transistor SAMOS reprenant le
même principe que le FAMOS sauf que l’épaisseur entre les deux grilles est beaucoup plus faible.
Programmation
Une forte tension électrique appliquée entre grille et source conduit à la programmation de la
mémoire. Une forte tension inverse provoquera la libération des électrons et donc l’effacement de la mémoire.
Avantages :
 Comportement d'une RAM non Volatile.
Comportement d'une RAM non Volatile.
Programmation et effacement mot par mot possible.
Inconvénients :
Très lente pour une utilisation en RAM.
Coût de réalisation.
3.3.2.5 La FLASH EPROM
La mémoire Flash s'apparente à la technologie de l’EEPROM. Elle est programmable et effaçable électriquement comme les EEPROM.
Structure
 Il existe deux technologie différentes qui se différencient par
Il existe deux technologie différentes qui se différencient par
l’organisation de leurs réseaux mémoire : l’architecture NOR et NAND. L’architecture NOR propose un assemblage des cellules élémentaires de mémorisation en parallèle avec les lignes de sélection comme dans une EEPROM classique. L’architecture NAND propose un assemblage en série de ces mêmes cellules avec les lignes de sélection. D’un point de vue pratique, la différence majeure entre NOR et NAND tient à leurs interfaces. Alors qu’une NOR dispose de bus d’adresses et de données dédiés, la NAND est
dotée d’une interface d’E/S indirecte. . Par contre, la structure NAND autorise une implantation plus dense grâce à une taille de cellule approximativement 40 % plus petite que la structure NOR.
Programmation
 Si NOR et NAND exploitent toutes deux le même principe de stockage de charges dans la grille flottante d’un transistor, l’organisation de leur réseau mémoire n’offre pas la même souplesse d’utilisation. Les Flash NOR autorise un adressage aléatoire qui permet de la programmer
Si NOR et NAND exploitent toutes deux le même principe de stockage de charges dans la grille flottante d’un transistor, l’organisation de leur réseau mémoire n’offre pas la même souplesse d’utilisation. Les Flash NOR autorise un adressage aléatoire qui permet de la programmer
octet par octet alors que la Flash NAND autorise un accès séquentiel aux données et permettra
seulement une programmation par secteur comme sur un disque dur.
Avantages :
Comportement d'une RAM non Volatile.
Programmation et effacement mot par mot possible.
Temps d’accès faible.

Flash NAND :
Comportement d'une RAM non Volatile.
Forte densité d’intégration  coût réduit.
coût réduit.
Rapidité de l’écriture/lecture par paquet
Consommation réduite.
Inconvénients :
Flash NOR :
Lenteur de l’écriture/lecture par paquet.
coût.
Flash NAND :
Ecriture/lecture par octet impossible.
Interface E/S indirecte
La Flash EPROM a connu un essor très important ces dernières années avec le boom de la
téléphonie portable et des appareils multimédia (PDA, appareil photo numérique, lecteur MP3, etc...).
3.4 Critères de choix d’une mémoire
Les principaux critères à retenir sont :
capacité
vitesse
consommation
coût
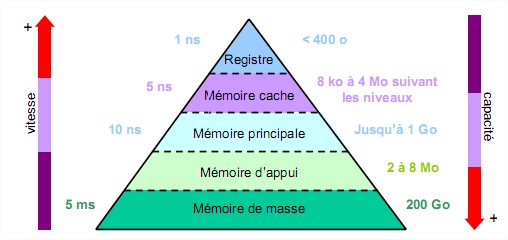
3.5 Notion de hiérarchie mémoire
Une mémoire idéale serait une mémoire de grande capacité, capable de stocker un maximum
d’informations et possédant un temps d’accès très faible afin de pouvoir travailler rapidement sur ces informations. Mais il se trouve que les mémoires de grande capacité sont souvent très lente et que les mémoire rapides sont très chères. Et pourtant, la vitesse d’accès à la mémoire conditionne dans une large mesure les performances d’un système. En effet, c’est là que se trouve le goulot d’étranglement entre un microprocesseur capable de traiter des informations très rapidement et une mémoire beaucoup plus lente (ex : processeur actuel à 3Ghz et mémoire à 400MHz). Or, on n’a jamais besoin de toutes les informations au même moment. Afin d’obtenir le meilleur compromis coût-performance, on définie donc une hiérarchie mémoire. On utilise des mémoires de faible capacité mais très rapide pour stocker les informations dont le microprocesseur se sert le plus et on utilise des mémoires de capacité importante mais beaucoup plus lente pour stocker les informations dont le microprocesseur se sert le moins. Ainsi, plus on s’éloigne du microprocesseur et plus la capacité et le temps d’accès des mémoire vont augmenter.
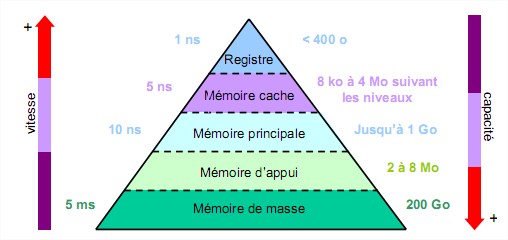
Les registres sont les éléments de mémoire les plus rapides. Ils sont situés au niveau du processeur et servent au stockage des opérandes et des résultats intermédiaires.
La mémoire cache est une mémoire rapide de faible capacité destinée à accélérer l’accès à la mémoire centrale en stockant les données les plus utilisées.
La mémoire principale est l’organe principal de rangement des informations. Elle contient
les programmes (instructions et données) et est plus lente que les deux mémoires précédentes.
La mémoire d’appui sert de mémoire intermédiaire entre la mémoire centrale et les mémoires de masse. Elle joue le même rôle que la mémoire cache.
La mémoire de masse est une mémoire périphérique de grande capacité utilisée pour le
stockage permanent ou la sauvegarde des informations. Elle utilise pour cela des supports magnétiques (disque dur, ZIP) ou optiques (CDROM, DVDROM).
Note de cours
T.Dumartin
1 Généralités
1.1 Introduction
L'informatique, contraction d'information et automatique, est la science du traitement de l'information. Apparue au milieu du 20ème siècle, elle a connu une évolution extrêmement rapide. A sa motivation initiale qui était de faciliter et d'accélérer le calcul, se sont ajoutées de nombreuses
fonctionnalités, comme l'automatisation, le contrôle et la commande de processus, la communication ou le partage de l'information.
Le cours d’architecture des systèmes à microprocesseurs expose les principes de base du
traitement programmé de l’information. La mise en œuvre de ces systèmes s’appuie sur deux modes de réalisation distincts, le matériel et le logiciel. Le matériel (hardware) correspond à l’aspect concret du système : unité centrale, mémoire, organes d’entrées-sorties, etc… Le logiciel (software) correspond à un ensemble d’instructions , appelé programme, qui sont contenues dans les différentes mémoires du système et qui définissent les actions effectuées par le matériel.
1.2 Qu’entend-t-on par architecture ?
L'architecture d'un système à microprocesseur représente l’organisation de ses différentes
unités et de leurs interconnexions. Le choix d'une architecture est toujours le résultat d'un compromis :
- entre performances et coûts
- entre efficacité et facilité de construction
- entre performances d'ensemble et facilité de programmation
- etc …
{kind=link} 1.3 Qu’est ce qu’un microprocesseur ?
1.3 Qu’est ce qu’un microprocesseur ? Un microprocesseur est un circuit intégré complexe. Il
résulte de l’intégration sur une puce de fonctions logiques combinatoires (logiques et/ou arithmétique) et séquentielles (registres, compteur, etc…). Il est capable d'interpréter et d'exécuter les instructions d'un programme. Son domaine d’utilisation est donc presque illimité. Le concept de microprocesseur a été créé par la Société Intel. Cette Société, créée en 1968, était spécialisée dans la conception et la fabrication de puces mémoire. À la demande de deux de ses clients — fabricants de calculatrices et de terminaux — Intel étudia une unité de calcul
implémentée sur une seule puce. Ceci donna naissance, en 1971, au premier microprocesseur, le
4004, qui était une unité de calcul 4 bits fonctionnant à 108 kHz. Il résultait de l’intégration d’environ 2300 transistors.
Remarques :
La réalisation de circuits intégrés de plus en plus complexe a été rendue possible par
l’apparition du transistor en 1947. Il a fallu attendre 1958 pour voir apparaître le 1
circuit intégré réalisé par Texas Instrument. 1.4 Rappels
Les informations traitées par un microprocesseur sont de différents types (nombres,
instructions, images, vidéo, etc…) mais elles sont toujours représentées sous un format binaire. Seul le codage changera suivant les différents types de données à traiter. Elles sont représentées
physiquement par 2 niveaux de tensions différents.
En binaire, une information élémentaire est appelé bit et ne peut prendre que deux valeurs différentes : 0 ou 1.
Une information plus complexe sera codée sur plusieurs bit. On appelle cet ensemble un mot.
Un mot de 8 bits est appelé un octet.
Représentation d’un nombre entier en binaire :
Les nombres sont exprimés par des chiffres pouvant prendre deux valeurs 0 ou 1. A chaque
chiffre est affecté un poids exprimé en puissance de 2.
Représentation d’un nombre entier en hexadécimal :
Lorsqu’une donnée est représentée sur plus de 4 bits, on préfère souvent l’exprimer en
hexadécimal. Les nombres sont exprimés par des chiffres et des lettres pouvant prendre 16 valeurs:
0 1 2 3 4 5 6 7 8 9 A B C D E F
A chaque chiffre est affecté un poids exprimé en puissance de 16.
Attention !! :
1.5 Où trouve-t-on des systèmes à microprocesseur ?
Les applications des systèmes à microprocesseurs sont multiples et variées :
- Ordinateur, PDA
- console de jeux
- calculatrice
- télévision
- téléphone portable
- distributeur automatique d’argent
- robotique
- lecteur carte à puce, code barre
- automobile
- instrumentation
- etc…
2.1 Modèle de von Neumann
Pour traiter une information, un microprocesseur seul ne suffit pas, il faut l’insérer au sein d’un
système minimum de traitement programmé de l’information. John Von Neumann est à l'origine d'un modèle de machine universelle de traitement programmé de l’information (1946). Cette architecture sert de base à la plupart des systèmes à microprocesseur actuel. Elle est composé des éléments suivants :
une unité centrale une mémoire principale des interfaces d’entrées/sortiesLes différents organes du système sont reliés par des voies de communication appelées bus.
Elle est composée par le microprocesseur qui est chargé d’interpréter et d’exécuter les
instructions d’un programme, de lire ou de sauvegarder les résultats dans la mémoire et de
communiquer avec les unités d’échange. Toutes les activités du microprocesseur sont cadencées par une horloge.
On caractérise le microprocesseur par :
– sa fréquence d’horloge : en MHz ou GHz
– le nombre d’instructions par secondes qu’il est capable d’exécuter : en MIPS
– la taille des données qu’il est capable de traiter : en bits
2.3 La mémoire principale
Elle contient les instructions du ou des programmes en cours d’exécution et les données
associées à ce programme. Physiquement, elle se décompose souvent en :
– une mémoire morte ( ROM = Read Only Memory ) chargée de stocker le programme. C’est une mémoire à lecture seule.
– une mémoire vive ( RAM = Random Access Memory ) chargée de stocker les données intermédiaires ou les résultats de calculs. On peut lire ou écrire des données dedans, ces données sont perdues à la mise hors tension.
Remarque :
Les disques durs, disquettes, CDROM, etc… sont des périphériques de stockage et sont considérés comme des mémoires secondaires.
Elles permettent d’assurer la communication entre le microprocesseur et les périphériques. (capteur, clavier, moniteur ou afficheur, imprimante, modem, etc…).
2.5 Les bus
Un bus est un ensemble de fils qui assure la transmission du même type d’information. On
retrouve trois types de bus véhiculant des informations en parallèle dans un système de traitement
programmé de l’information :
- un bus de données : bidirectionnel qui assure le transfert des informations entre le microprocesseur et son environnement, et inversement. Son nombre de lignes est égal à la capacité de traitement du microprocesseur.
- un bus d'adresses: unidirectionnel qui permet la sélection des informations à traiter dans un espace mémoire (ou espace adressable) qui peut avoir 2n
emplacements, avec n = nombre de conducteurs du bus d'adresses.
- un bus de commande: constitué par quelques conducteurs qui assurent la synchronisation des flux d'informations sur les bus des données et des adresses.
2.6 Décodage d’adresses
La multiplication des périphériques autour du microprocesseur oblige la présence d’un
décodeur d’adresse chargé d’aiguiller les données présentes sur le bus de données.
En effet, le microprocesseur peut communiquer avec les différentes mémoires et les différents
boîtier d’interface. Ceux-ci sont tous reliés sur le même bus de données et afin d’éviter des conflits, un seul composant doit être sélectionné à la fois.
Lorsqu’on réalise un système microprogrammé, on attribue donc à chaque périphérique une zone
d’adresse et une fonction « décodage d’adresse » est donc nécessaire afin de fournir les signaux de
sélection de chacun des composants.
impédance » afin de ne pas perturber les données circulant sur le bus. ( elle présente une impédance de sortie très élevée = circuit ouvert ).
3 Les mémoires
Une mémoire est un circuit à semi-conducteur permettant d’enregistrer, de conserver et de restituer des informations (instructions et variables). C’est cette capacité de mémorisation qui explique la polyvalence des systèmes numériques et leur adaptabilité à de nombreuses situations. Les informations peuvent être écrites ou lues. Il y a écriture lorsqu'on enregistre des informations en mémoire, lecture lorsqu'on récupère des informations précédemment enregistrées.
Une mémoire peut être représentée comme une armoire de rangement constituée de différents
tiroirs. Chaque tiroir représente alors une case mémoire qui peut contenir un seul élément : des
données. Le nombre de cases mémoires pouvant être très élevé, il est alors nécessaire de pouvoir
les identifier par un numéro. Ce numéro est appelé adresse. Chaque donnée devient alors
accessible grâce à son adresse
 cases mémoire. Chaque case est remplie par un mot de données (sa longueur m est toujours une puissance de 2). Le nombre de fils d’adresses d’un boîtier mémoire définit donc le nombre de cases mémoire que comprend le boîtier. Le nombre de fils de données définit la taille des données que l’on peut sauvegarder dans chaque case mémoire.
cases mémoire. Chaque case est remplie par un mot de données (sa longueur m est toujours une puissance de 2). Le nombre de fils d’adresses d’un boîtier mémoire définit donc le nombre de cases mémoire que comprend le boîtier. Le nombre de fils de données définit la taille des données que l’on peut sauvegarder dans chaque case mémoire. En plus du bus d’adresses et du bus de données, un boîtier mémoire comprend une entrée de
commande qui permet de définir le type d’action que l’on effectue avec la mémoire (lecture/écriture) et une entrée de sélection qui permet de mettre les entrées/sorties du boîtier en haute impédance.
On peut donc schématiser un circuit mémoire par la figure suivante où l’on peut distinguer :
les entrées d’adresses les entrées de données les sorties de données les entrées de commandes : - une entrée de sélection de lecture ou d’écriture.
- une entrée de sélection du circuit.
Une opération de lecture ou d’écriture de la mémoire suit toujours le même cycle :
1. sélection de l’adresse
2. choix de l’opération à effectuer
3. sélection de la mémoire
4. lecture ou écriture la donnée
Remarque :
Les entrées et sorties de données sont très souvent regroupées sur des bornes bidirectionnelles.
3.2 Caractéristiques d’une mémoire
La capacité : c’est le nombre total de bits que contient la mémoire. Elle s’exprime aussi souvent en octet.
Le format des données : c’est le nombre de bits que l’on peut mémoriser par case mémoire. On dit aussi que c’est la largeur du mot mémorisable.
Le temps d’accès : c’est le temps qui s'écoule entre l'instant où a été lancée une opération de lecture/écriture en mémoire et l'instant où la première information est disponible sur le bus
de données.
Le temps de cycle : il représente l'intervalle minimum qui doit séparer deux demandes successives de lecture ou d'écriture.
Le débit : c’est le nombre maximum d'informations lues ou écrites par seconde. Volatilité : elle caractérise la permanence des informations dans la mémoire. L'information stockée est volatile si elle risque d'être altérée par un défaut d'alimentation électrique et non
volatile dans le cas contraire.
Exemple : Chronogramme d’un cycle de lecture
Les mémoires utilisées pour réaliser la mémoire principale d’un système à microprocesseur
sont des mémoires à semi-conducteur. On a vu que dans ce type de mémoire, on accède directement à n'importe quelle information dont on connaît l'adresse et que le temps mis pour obtenir cette information ne dépend pas de l'adresse. On dira que l'accès à une telle mémoire est aléatoire ou direct.
A l'inverse, pour accéder à une information sur bande magnétique, il faut dérouler la bande en
repérant tous les enregistrements jusqu'à ce que l'on trouve celui que l'on désire. On dit alors que
l'accès à l'information est séquentiel. Le temps d'accès est variable selon la position de l'information recherchée. L'accès peut encore être semi-séquentiel : combinaison des accès direct et séquentiel. Pour un disque magnétique par exemple l'accès à la piste est direct, puis l'accès au secteur est séquentiel.
3.3 Différents types de mémoire
3.3.1 Les mémoires vives (RAM)
Une mémoire vive sert au stockage temporaire de données. Elle doit avoir un temps de cycle
très court pour ne pas ralentir le microprocesseur. Les mémoires vives sont en général volatiles : elles perdent leurs informations en cas de coupure d'alimentation. Certaines d'entre elles, ayant une faible consommation, peuvent être rendues non volatiles par l'adjonction d'une batterie. Il existe deux grandes familles de mémoires RAM (Random Acces Memory : mémoire à accès aléatoire) :
Les RAM statiques Les RAM dynamiques3.3.1.1 Les RAM statiques
Le bit mémoire d'une RAM statique (SRAM) est composé d'une bascule. Chaque bascule
contient entre 4 et 6 transistors.
3.3.1.2 Les RAM dynamiques
Dans les RAM dynamiques (DRAM), l'information est mémorisée sous la forme d'une charge
électrique stockée dans un condensateur (capacité grille substrat d'un transistor MOS).
 Avantages :
Avantages : Cette technique permet une plus grande densité d'intégration, car un point mémoire nécessite
environ quatre fois moins de transistors que dans une mémoire statique. Sa consommation s’en
retrouve donc aussi très réduite.
Inconvénients : La présence de courants de fuite dans le condensateur contribue à sa décharge. Ainsi,
l’information est perdue si on ne la régénère pas périodiquement (charge du condensateur). Les RAM dynamiques doivent donc être rafraîchies régulièrement pour entretenir la mémorisation : il s'agit de lire l'information et de la recharger. Ce rafraîchissement indispensable a plusieurs conséquences :
- il complique la gestion des mémoires dynamiques car il faut tenir compte des actions de rafraîchissement qui sont prioritaires.
- la durée de ces actions augmente le temps d'accès aux informations.
D’autre part, la lecture de l’information est destructive. En effet, elle se fait par décharge de la capacité du point mémoire lorsque celle-ci est chargée. Donc toute lecture doit être suivie d’une
réécriture.
3.3.1.3 Conclusions
En général les mémoires dynamiques, qui offrent une plus grande densité d'information et un
coût par bit plus faible, sont utilisées pour la mémoire centrale, alors que les mémoires statiques, plus rapides, sont utilisées lorsque le facteur vitesse est critique, notamment pour des mémoires de petite taille comme les caches et les registres.
Remarques :
Voici un historique de quelques DRAM qui ont ou sont utilisées dans les PC :
La DRAM FPM (Fast Page Mode, 1987) : Elle permet d'accéder plus rapidement à des données en introduisant la notion de page mémoire. (33 à 50 Mhz) La DRAM EDO (Extended Data Out, 1995) : Les composants de cette mémoire permettent de conserver
plus longtemps l'information, on peut donc ainsi espacer les cycles de rafraîchissement. Elle apporte aussi la possibilité d’anticiper sur le prochain cycle mémoire. (33 à 50 Mhz)
La DRAM BEDO (Bursted EDO) : On n'adresse plus chaque unité de mémoire individuellement lorsqu'il faut y lire ou y écrire des données. On se contente de transmettre l'adresse de départ du processus de lecture/écriture et la longueur du bloc de données ( Burst ). Ce procédé permet de gagner beaucoup de temps, notamment avec les grands paquets de données tels qu'on en manipule avec les applications modernes. (66 Mhz) La Synchronous DRAM (SDRAM, 1997) : La mémoire SDRAM a pour particularité de se synchroniser sur une horloge. Les mémoires FPM, EDO étaient des mémoires asynchrones et elle induisaient des temps d'attentes lors de la synchronisation. Elle se compose en interne de deux bancs de mémoire et des données peuvent être lues alternativement sur l'un puis sur l'autre de ces bancs grâce à un procédé d'entrelacement spécial. Le protocole d'attente devient donc tout à fait inutile. Cela lui permet de supporter des fréquences plus élevées qu’avant (100 Mhz).
La DDR-I ou DDR-SDRAM (Double Data Rate Synchronous DRAM, 2000) : La DDR-SDRAM
permet de recevoir ou d'envoyer des données lors
du front montant et du front descendant de l’horloge.
(133 à 200 MHz)
3.3.2 Les mémoires mortes (ROM)
Pour certaines applications, il est nécessaire de pouvoir conserver des informations de façon
permanente même lorsque l'alimentation électrique est interrompue. On utilise alors des mémoires
mortes ou mémoires à lecture seule (ROM : Read Only Memory). Ces mémoires sont non volatiles.
Ces mémoires, contrairement aux RAM, ne peuvent être que lue. L’inscription en mémoire des
données restent possible mais est appelée programmation. Suivant le type de ROM, la méthode de
programmation changera. Il existe donc plusieurs types de ROM :
ROM PROM EPROM EEPROM FLASH EPROM.3.3.2.1 LA ROM
Elle est programmée par le fabricant et son contenu ne peut plus être ni modifié., ni effacé par
l'utilisateur.
 Structure :
Structure : Cette mémoire est composée d'une matrice dont la programmation s’effectue en reliant les lignes aux colonnes par des diodes. L'adresse permet de sélectionner une ligne de la matrice et les données sont alors reçues sur les colonnes (le nombre de colonnes fixant la taille des mots mémoire).
Programmation : L'utilisateur doit fournir au constructeur un masque indiquant les emplacements des diode dans matrice.
Avantages : Densité élevée Non volatile Mémoire rapide Inconvénients : Écriture impossible Modification impossible (toute erreur est fatale). Délai de fabrication (3 à 6 semaines) Obligation de grandes quantités en raison du coût élevé qu'entraîne la production du masque et le processus de fabrication. 3.3.2.2 La PROM
C’est une ROM qui peut être programmée une seule fois par l'utilisateur (Programmable ROM). La programmation est réalisée à partir d’un programmateur spécifique.
Structure : Les liaisons à diodes de la ROM sont remplacées par des fusibles pouvant être détruits ou des
jonctions pouvant être court-circuitées.
Programmation :Les PROM à fusible sont livrées avec toutes les lignes connectées aux colonnes (0 en chaque
point mémoire). Le processus de programmation consiste donc à programmer les emplacements des ‘’1’’ en générant des impulsions de courants par l’intermédiaire du programmateur ; les fusibles situés aux points mémoires sélectionnés se retrouvant donc détruits.
Le principe est identique dans les PROM à jonctions sauf que les lignes et les colonnes sont
déconnectées (1 en chaque point mémoire). Le processus de programmation consiste donc à
programmer les emplacements des ‘’0’’ en générant des impulsions de courants par l’intermédiaire du programmateur ; les jonctions situées aux points mémoires sélectionnés se retrouvant court-circuitées par effet d’avalanche.
Avantages : idem ROM Claquage en quelques minutes Coût relativement faible Inconvénients : Modification impossible (toute erreur est fatale).3.3.2.3 L’EPROM ou UV-EPROM
Pour faciliter la mise au point d'un programme ou tout simplement permettre une erreur de
programmation, il est intéressant de pouvoir reprogrammer une PROM. La technique de claquage
utilisée dans celles-ci ne le permet évidemment pas. L'EPROM (Erasable Programmable ROM) est une PROM qui peut être effacée.
Structure Dans une EPROM, le point mémoire est réalisé à partir d’un
transistor FAMOS (Floating gate Avalanche injection Metal Oxyde Silicium). Ce transistor MOS a été introduit par Intel en 1971 et a la particularité de posséder une grille flottante.
ProgrammationLa programmation consiste à piéger des charges dans la grille flottante. Pour cela, il faut tout d’abord appliquer une très forte tension entre Grille et Source. Si l’on applique ensuite une tension entre D et S, la canal devient conducteur. Mais comme la tension Grille-Source est très importante, les électrons sont déviés du canal vers la grille flottante et capturés par celle-ci. Cette charge se maintient une dizaine d'années en condition normale. L’exposition d’une vingtaine de minutes à un rayonnement ultraviolet permet d’annuler la charge stockée dans la grille flottante. Cet effacement est reproductible plus d’un millier de fois. Les boîtiers des EPROM se caractérise donc par la présence d’une petite fenêtre transparente en quartz qui assure le passage des UV. Afin d’éviter toute perte accidentelle de l’information, il faut obturer la fenêtre d’effacement lors de l’utilisation.
Avantages : Reprogrammable et non Volatile Inconvénients : Impossible de sélectionner une seule cellule à effacer Impossible d’effacer la mémoire in-situ. l’écriture est beaucoup plus lente que sur une RAM. (environ 1000x) L’EEPROM (Electically EPROM) est une mémoire programmable et effaçable électriquement.
Elle répond ainsi à l’inconvénient principal de l’EPROM et peut être programmée in situ.
StructureDans une EEPROM, le point mémoire est réalisé à partir d’un transistor SAMOS reprenant le
même principe que le FAMOS sauf que l’épaisseur entre les deux grilles est beaucoup plus faible.
ProgrammationUne forte tension électrique appliquée entre grille et source conduit à la programmation de la
mémoire. Une forte tension inverse provoquera la libération des électrons et donc l’effacement de la mémoire.
Avantages : Comportement d'une RAM non Volatile. Programmation et effacement mot par mot possible. Inconvénients : Très lente pour une utilisation en RAM. Coût de réalisation.3.3.2.5 La FLASH EPROM
La mémoire Flash s'apparente à la technologie de l’EEPROM. Elle est programmable et effaçable électriquement comme les EEPROM.
Structure Il existe deux technologie différentes qui se différencient par l’organisation de leurs réseaux mémoire : l’architecture NOR et NAND. L’architecture NOR propose un assemblage des cellules élémentaires de mémorisation en parallèle avec les lignes de sélection comme dans une EEPROM classique. L’architecture NAND propose un assemblage en série de ces mêmes cellules avec les lignes de sélection. D’un point de vue pratique, la différence majeure entre NOR et NAND tient à leurs interfaces. Alors qu’une NOR dispose de bus d’adresses et de données dédiés, la NAND est
dotée d’une interface d’E/S indirecte. . Par contre, la structure NAND autorise une implantation plus dense grâce à une taille de cellule approximativement 40 % plus petite que la structure NOR.
ProgrammationSi NOR et NAND exploitent toutes deux le même principe de stockage de charges dans la grille flottante d’un transistor, l’organisation de leur réseau mémoire n’offre pas la même souplesse d’utilisation. Les Flash NOR autorise un adressage aléatoire qui permet de la programmer octet par octet alors que la Flash NAND autorise un accès séquentiel aux données et permettra
seulement une programmation par secteur comme sur un disque dur.
Avantages :
Flash NOR :
Comportement d'une RAM non Volatile. Programmation et effacement mot par mot possible. Temps d’accès faible. Flash NAND :
Comportement d'une RAM non Volatile. Forte densité d’intégration coût réduit. Rapidité de l’écriture/lecture par paquet Consommation réduite. Inconvénients : Flash NOR :
Lenteur de l’écriture/lecture par paquet. coût.Flash NAND :
Ecriture/lecture par octet impossible. Interface E/S indirecte La Flash EPROM a connu un essor très important ces dernières années avec le boom de la
téléphonie portable et des appareils multimédia (PDA, appareil photo numérique, lecteur MP3, etc...).
3.4 Critères de choix d’une mémoire
Les principaux critères à retenir sont :
capacité vitesse consommation coût3.5 Notion de hiérarchie mémoire
Une mémoire idéale serait une mémoire de grande capacité, capable de stocker un maximum
d’informations et possédant un temps d’accès très faible afin de pouvoir travailler rapidement sur ces informations. Mais il se trouve que les mémoires de grande capacité sont souvent très lente et que les mémoire rapides sont très chères. Et pourtant, la vitesse d’accès à la mémoire conditionne dans une large mesure les performances d’un système. En effet, c’est là que se trouve le goulot d’étranglement entre un microprocesseur capable de traiter des informations très rapidement et une mémoire beaucoup plus lente (ex : processeur actuel à 3Ghz et mémoire à 400MHz). Or, on n’a jamais besoin de toutes les informations au même moment. Afin d’obtenir le meilleur compromis coût-performance, on définie donc une hiérarchie mémoire. On utilise des mémoires de faible capacité mais très rapide pour stocker les informations dont le microprocesseur se sert le plus et on utilise des mémoires de capacité importante mais beaucoup plus lente pour stocker les informations dont le microprocesseur se sert le moins. Ainsi, plus on s’éloigne du microprocesseur et plus la capacité et le temps d’accès des mémoire vont augmenter.
 Les registres sont les éléments de mémoire les plus rapides. Ils sont situés au niveau du processeur et servent au stockage des opérandes et des résultats intermédiaires. La mémoire cache est une mémoire rapide de faible capacité destinée à accélérer l’accès à la mémoire centrale en stockant les données les plus utilisées. La mémoire principale est l’organe principal de rangement des informations. Elle contient
Les registres sont les éléments de mémoire les plus rapides. Ils sont situés au niveau du processeur et servent au stockage des opérandes et des résultats intermédiaires. La mémoire cache est une mémoire rapide de faible capacité destinée à accélérer l’accès à la mémoire centrale en stockant les données les plus utilisées. La mémoire principale est l’organe principal de rangement des informations. Elle contient les programmes (instructions et données) et est plus lente que les deux mémoires précédentes.
La mémoire d’appui sert de mémoire intermédiaire entre la mémoire centrale et les mémoires de masse. Elle joue le même rôle que la mémoire cache. La mémoire de masse est une mémoire périphérique de grande capacité utilisée pour le stockage permanent ou la sauvegarde des informations. Elle utilise pour cela des supports magnétiques (disque dur, ZIP) ou optiques (CDROM, DVDROM).
Aucun commentaire:
Enregistrer un commentaire