
Je vous propose dans ce montage de réaliser une carte à double utilisation : un variateur de vitesse pour deux moteurs à courant continu basé sur le principe de la modulation de largeur d'impulsion MLI dite aussi PWM (pulse width modulation) et une carte de commande d’un moteur pas à pas bipolaire.

 Sur le schéma (A) le moteur est à l'arrêt (on devrait même dire qu'il est freiné : en effet court-circuiter les deux pôles d'un moteur revient à le freiner). Sur le schéma (B) il tourne dans le sens inverse du schéma (C) et enfin sur le schéma (D) il est freiné. Et bien voici la base du pont en H, toute l'idée réside dans ce schéma. Bien sûr, pour l'implémenter, il va nous falloir remplacer les interrupteurs par des transistors.
Sur le schéma (A) le moteur est à l'arrêt (on devrait même dire qu'il est freiné : en effet court-circuiter les deux pôles d'un moteur revient à le freiner). Sur le schéma (B) il tourne dans le sens inverse du schéma (C) et enfin sur le schéma (D) il est freiné. Et bien voici la base du pont en H, toute l'idée réside dans ce schéma. Bien sûr, pour l'implémenter, il va nous falloir remplacer les interrupteurs par des transistors.
 4 transistors, symbolisés ici par des interrupteurs T1, T2, T3 et T4, sont montés en pont et permettent de commander le sens de rotation du moteur : Lorsque T1 et T4 sont fermés (saturés), le moteur tourne dans un sens (sens 1). Lorsque T2 et T3 sont fermés, le moteur va tourner dans l'autre sens (sens 2).
4 transistors, symbolisés ici par des interrupteurs T1, T2, T3 et T4, sont montés en pont et permettent de commander le sens de rotation du moteur : Lorsque T1 et T4 sont fermés (saturés), le moteur tourne dans un sens (sens 1). Lorsque T2 et T3 sont fermés, le moteur va tourner dans l'autre sens (sens 2).
 La sortie PWM du microcontrôleur est utilisée pour commander le transistor, en mikropascal nous disposons des procédures suivantes :
La sortie PWM du microcontrôleur est utilisée pour commander le transistor, en mikropascal nous disposons des procédures suivantes :


 C’est un dispositif d’isolement qui permet la transmission de niveau électrique de manière non galvanique. Il est constitué d’une diode électroluminescente (LED) et d’un phototransistor intégré dans le même boîtier. Il réalise une conversion de “l’énergie électrique en énergie électrique, la tension d’isolement entre les deux parties de circuit peut être de l’ordre de quelques milliers de volt.
C’est un dispositif d’isolement qui permet la transmission de niveau électrique de manière non galvanique. Il est constitué d’une diode électroluminescente (LED) et d’un phototransistor intégré dans le même boîtier. Il réalise une conversion de “l’énergie électrique en énergie électrique, la tension d’isolement entre les deux parties de circuit peut être de l’ordre de quelques milliers de volt.




 Les moteurs pas à pas permettent de convertir directement un signal électrique numérique en un positionnement angulaire de caractère incrémental. Comme leur nom l’indique, ces moteurs tournent en fonction des impulsions électriques reçues dans ses bobinages.
Les moteurs pas à pas permettent de convertir directement un signal électrique numérique en un positionnement angulaire de caractère incrémental. Comme leur nom l’indique, ces moteurs tournent en fonction des impulsions électriques reçues dans ses bobinages.

Alimentation des enroulements d’un moteur bipolaireLe sens de rotation d'un moteur pas à pas bipolaire dépend du sens du courant et de L’ordre d'alimentation des bobinages.
C’est très comparable à une commande de deux moteurs à courant continu avec deux sens de rotation.
 La commande du moteur s’effectue par envoie successif, une à une, des combinaisons suivantes :
La commande du moteur s’effectue par envoie successif, une à une, des combinaisons suivantes :


1) Variateur de vitesse pour deux moteurs à courant continu
1.1) Principe général d’inversion de polarité :
Pour inverser le sens de rotation d’un moteur, il suffit de fermer deux des contacts pour faire tourner le moteur dans un sens ou dans l'autre1.2) Variation de sens par pont en H :
Un pont en H c'est un circuit destiné au pilotage de sens de rotation d’un moteur qui met en œuvre quatre transistors. Il a deux rôles principaux :- Fournir le courant nécessaire au fonctionnement du moteur.
- Donner la possibilité d'inverser le sens du courant (donc le sens de rotation du moteur).
1.3) Variation de vitesse du moteur :
Pour faire varier la vitesse d'un moteur on peut faire varier la tension d'alimentation à ses bornes mais dans ce cas une partie importante de l'énergie est consommée par le dispositif d’alimentation, on préfère l'alimenter de façon discontinue avec un hacheur et faire ainsi varier la tension moyenne à ses bornes. On parle alors de Modulation par Largeur d'Impulsions (MLI), ou Pulse Width Modulation (PWM).- PWM_init PWM_change_duty(val) Le rapport cyclique du signal est égal à val / 255,
- PWM_stop arrête le moteur,
- PWM_change_duty(255) alimente le moteur avec la tension maximale,
- PWM_change_duty(64) alimente le moteur au quart de la tension.
2) Schéma de principe de la carte :
3) Schéma du montage électronique :
Le montage est composé de quatre parties différentes :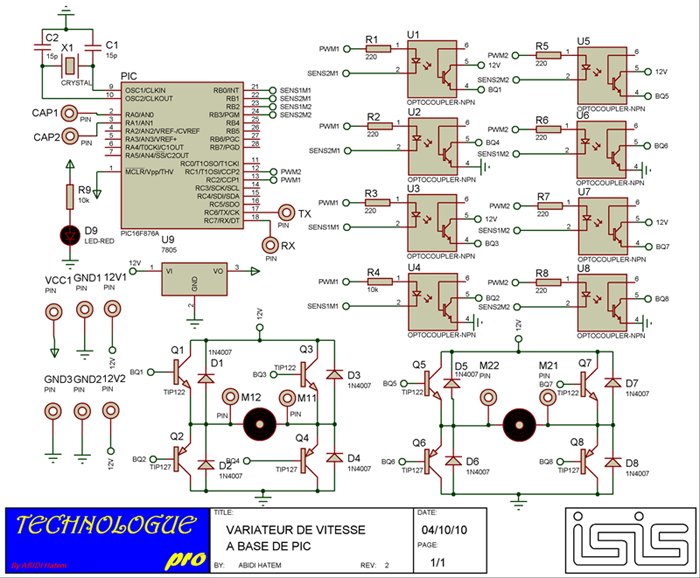 schema
schema- Partie alimentation.
- Partie commande et traitement des informations.
- Partie amplification et adaptation et isolation galvanique des signaux de commandes.
- Partie puissance.
3.1) Partie alimentation :
Cette partie contient 6 entrées d’alimentation : deux pour alimenter le/les moteur(s) qui sont 12V2 et GND2, deux pour alimenter le microcontrôleur directement en 5V (VCC1 et GND3) et deux autres sont prévus pour l’alimenter en 12V au cas ou en dispose pas de 5V (12V1 et GND1) à travers un régulateur de tension 7805. Le régulateur de tension permet d'obtenir une tension précise et continue dans un montage électronique. Il faut cependant que la source de tension soit de plus de 5 V pour que le montage fonctionne.3.2) Partie puissance :
Pour commander le sens de rotation ainsi que la vitesse d’un moteur à courant continu j’ai utilisé un pont de transistors : Le Hacheur quatre quadrants.3.3) Partie isolation galvanique :
3.4) Partie commande :
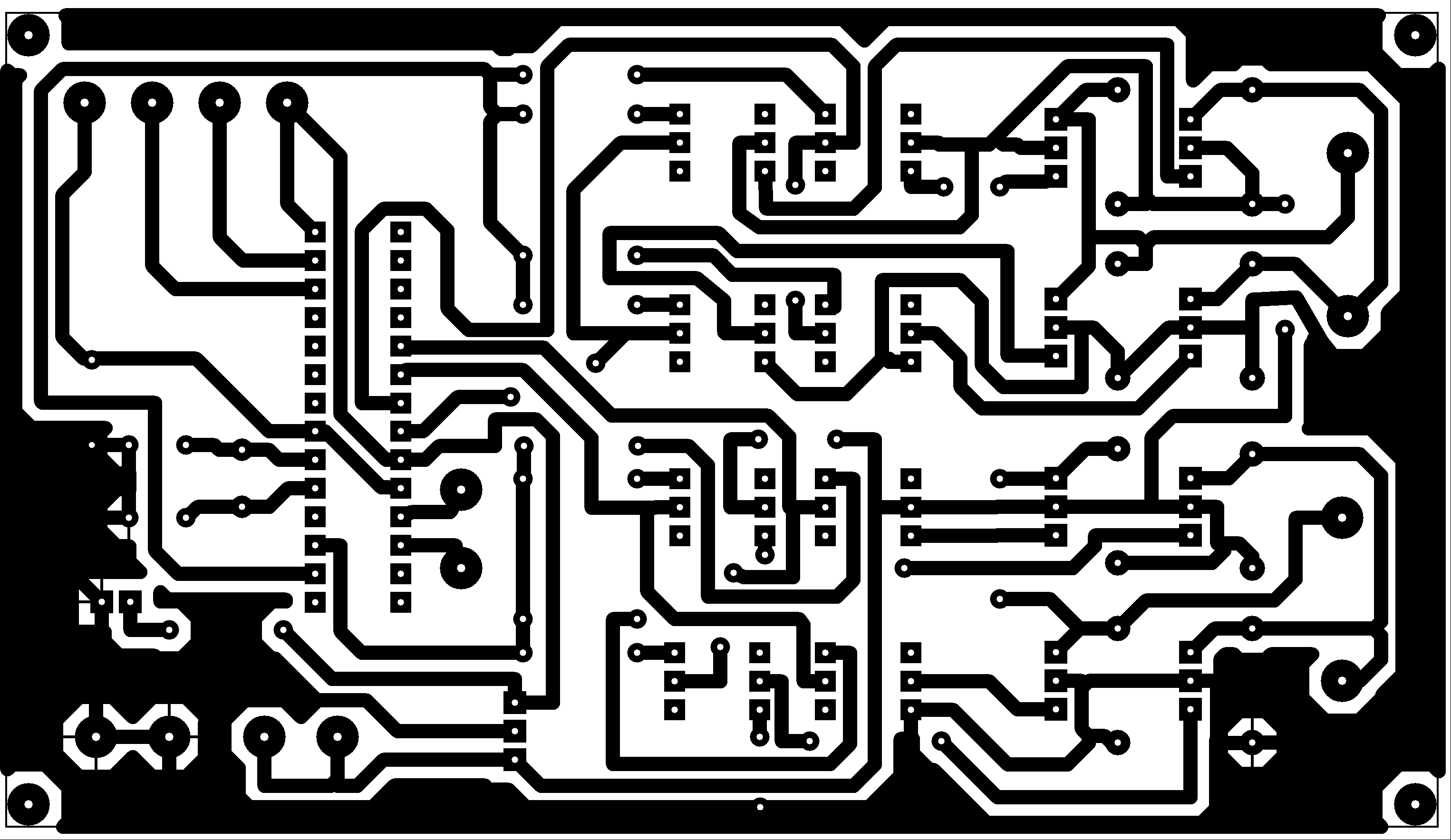
La partie commande est basé sur un PIC16F876 qui n’est rien d’autre qu’un microcontrôleur, c’est à dire une unité de traitement de l’information de type microprocesseur à la quelle on a ajouté des périphériques internes permettant de réaliser des montages sans nécessiter l’ajout de composants externes.4) Réalisation de la carte du variateur :
5) Possibilité de commander un moteur pas à pas bipolaire:
Alimentation des enroulements d’un moteur bipolaire
C’est très comparable à une commande de deux moteurs à courant continu avec deux sens de rotation.
Mode 1 : On alimente 1 enroulement à la fois :
Mode 2 : On alimente 2 enroulements à la fois :
Liste des Composants : | ||
| 4 Modules | ||
| Quantity: | References | Value |
| 4 | M11, M12, M21, M22 | PIN |
| 9 Resistors | ||
| Quantity: | References | Value |
| 7 | R1-R3, R5-R8 | 220 |
| 2 | R4, R9 | 10k |
| 2 Capacitors | ||
| Quantity: | References | Value |
| 2 | C1, C2 | 15p |
| 9 Integrated Circuits | ||
| Quantity: | References | Value |
| 8 | U1-U8 | OPTOCOUPLER-NPN |
| 1 | U9 | 7805 |
| 8 Transistors | ||
| Quantity: | References | Value |
| 4 | Q1, Q3, Q5, Q7 | TIP122 |
| 4 | Q2, Q4, Q6, Q8 | TIP127 |
| 9 Diodes | ||
| Quantity: | References | Value |
| 8 | D1-D8 | 1N4007 |
| 1 | D9 | LED-RED |
| 10 Miscellaneous | ||
| Quantity: | References | Value |
| 8 | CAP1, CAP2, GND1-GND3, RX, TX, VCC1 | PIN |
| 1 | PIC | PIC16F876A |
| 1 | X1 | CRYSTAL |
salut, a propos du crystal, il doit avoir quelle frequence? merci
RépondreSupprimer